Post-Processing-Kinematic and GPS Baseline Separation
Our Geo-MMS customers using our liDAR mapping drone system often ask, “how far our system can fly from the base station for post-processing-kinematic (PPK) data processing?”. The short answer is about 10 miles (15km). The reason for this requires a more detailed explanation of the basic principles of GPS system.
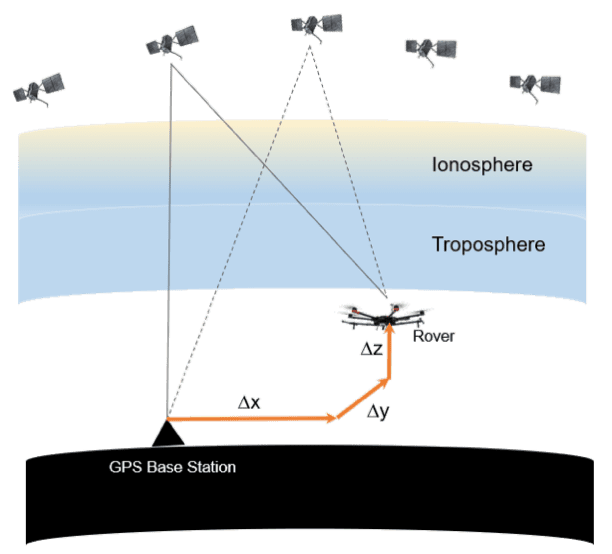
In PPK processing, what is calculated is the relative position of the rover (drone) with respect to the base station, as shown in the figure below. Using the techniques of base-rover relative processing i.e. PPK, many errors associated with the GPS receivers (base and rover) are cancelled out leading to improved accuracies at the centimeter level. However, there is one error source that cannot be entirely cancelled out unless the two receivers are operating at a relatively close distance to each other. These are the atmospheric errors.
Post-Processing-Kinematic (PPK) GPS Base Station
Since the GPS signals are traveling from the GPS satellites in space toward the GPS receivers on earth, these signals pass through several layers of the atmosphere, including the ionosphere and troposphere. These atmospheric layers effect the travel speed of the GPS signals as they propagate through the atmosphere since the signals are no longer traveling in a vacuum but are rather passing through the atmosphere. This change in speed (signal delay) effects the GPS observations at the base-rover GPS receivers leading to larger errors in position accuracy. To eliminate these atmospheric errors, the base GPS receiver and the rover GPS receiver need to be affected by similar atmospheric conditions which is true when the receivers operate closely to each other. The further apart these receivers are, the more different the atmosphere the signals pass through as they travel to the separated receivers. By sensing similar atmospheric delays, we can difference out these delays and thereby improve the accuracy of the solution. That is the reason a short-base line between the base-rover is ideal. If you are operating the system in a higher latitude, even shorter baselines, < 5 miles, are recommended, as the temperature and atmospheric conditions change abruptly in these areas.
To learn more about our products and what sets Geodetics Geo MMS product suite apart from the rest sign up for our monthly newsletter.
