Does a Dual-Camera Drone Offer Better Coverage?
“Give the customer what they need, but not what they want”. This is true for dual-camera drone configurations on UAV-LiDAR and photogrammetry mapping systems. These can be found in such products as Geodetics’ Point&Pixel and Geo-Photomap. At first glance, having the greater camera coverage offered by dual-cameras will provide better coverage of an area in a single UAV flight pass. Indeed, our Geo-Photomap (camera only) product provides these dual-camera drone advantages. However, when it comes to using dual-cameras in a multi-sensor LiDAR/camera system, such as Point&Pixel, the system design requires more detailed attention.
The most common uses of cameras when used in conjunction with LiDAR are: (1) generating orthomosaics, (2) providing independent image point clouds to augment LiDAR point clouds; and (3) colorization of LiDAR point clouds. The role of the camera sensor is different in each of these cases, and flight mission planning must be applied appropriately for the application. In the first two cases, the flight mission should be planned for a photogrammetric process where consideration of the lens (focal length) and the required Ground Sampling Distance (GSD) is paramount.
A “one size fits all” lens for photogrammetry projects does not exist. The figure below shows some examples of different lenses for the Sony a6000, one of the most popular camera options used with mobile mapping systems such as Geodetics Geo-MMS. As shown, each lens has a different Field of View (FOV) that provides different magnification, affecting relief-displacement of ground features.
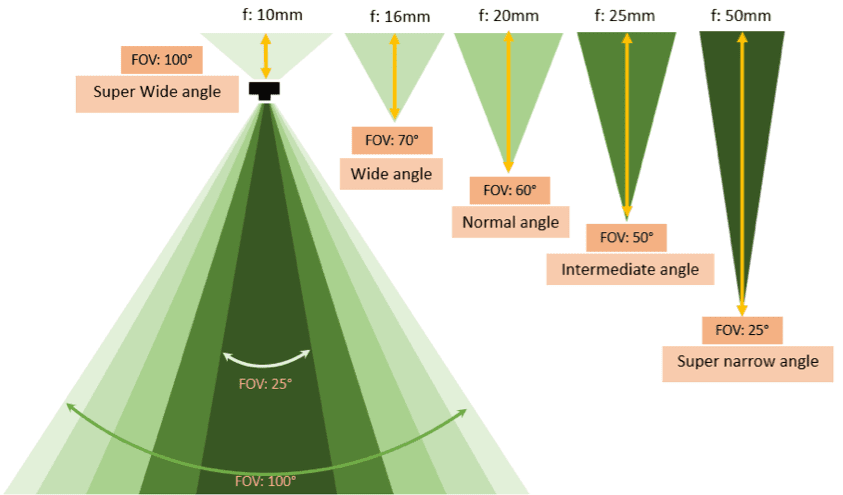
Example of different camera lens options for the Sony 6000
Shorter focal length lenses provide a wider FOV but produce significant relief-displacement and distortions of vertical-features. Conversely, longer focal length lenses with a narrower FOV provide a greater magnification with less relief-displacement. This is an important fact when considering different ground coverage areas. For example, when flying over an urban area, one needs a long focal length, which minimizes blind-spots caused by tall buildings and provides less relief-displacement. On the other hand, when flying over flatter terrain with fewer vertical-features, one can use a shorter focal length lens. Note that when using a 10mm lens compared to a 50mm lens, the camera FOV changes from 100° to 25° – this becomes critical when it comes to flying in conjunction with a LiDAR sensor.
The GSD is primarily a function of the focal length and flight altitude Above Ground Level (AGL). Assuming the use of a fixed-lens, the GSD changes as a function of the AGL altitude flown. In our example with a Sony a6000, the GSD can change from 1 cm/pixel @50m AGL to 2 cm/pixel @ 100m. Choosing the right GSD is also a function of the application. For photogrammetric applications (cases 1 & 2) a high GSD is required. However, for colorization of a LiDAR point cloud, a low GSD is preferred. The reason behind this is that the resolution of tactical-range LiDAR sensors is typically ~5 cm. This means the image GSD required for colorization can be relaxed to ~5 cm/pixel. Thus, flying at a high altitude and capturing fewer images more quickly is sufficient for LiDAR point cloud colorization.
In summary, if the purpose of the image data collection with a dual-camera drone is photogrammetry only, one should fly at a low altitude with an appropriate lens for mapping the environment. However, if a dual-camera is used for LiDAR point cloud colorization, flying at a high altitude is more appropriate. Flying at high-altitude may satisfy the needs of the camera, but it is not recommended or practical for tactical-range LiDAR sensors. A lower flight altitude is recommended to increase the density of LiDAR point clouds in these cases. To solve this dilemma, one approach is to fly at a fixed, average altitude. In this case, two cameras can be set relative to each other at a fixed angle and fly at a fixed altitude next to the LiDAR sensor. Here, the FOV of both the dual-camera and LiDAR will be in the same range. The problem is that the multi-sensor fusion is purposely designed for a fixed altitude, and if the system is used at a higher/lower altitude, the coverage of the dual-camera and LiDAR sensor won’t match.

Geo-MMS with Dual-Camera Configuration
Another approach is to simply fly at two altitudes. In the first flight, the area can be scanned at a high altitude (e.g. 100m) with a suitable lens at high speed. With this approach, a wide area can be covered quickly with a low GSD required for colorization. The image processing can also be done efficiently, as the number of images is optimized. After this, the system can be flown again at a lower altitude and speed to provide maximum point density for the LiDAR sensor.
Which approach works for you? Please contact Geodetics and let us know. Geodetics supports both approaches, but our aim is to give our customers what they need, not what they want.
