PPK vs RTK
Real-time Kinematic (RTK) and Post-processing Kinematic (PPK) are two related methods for improving GPS positioning accuracy – a technique commonly used in UAV mapping applications. Both methods make use of differential processing to enhance satellite-based positioning accuracy. As their names suggest, RTK performs the accuracy enhancement in real-time, while PPK does this in post mission processing. The choice of which method to use depends on the application and the operational environment.
Utilizing PPK is as simple as setting up a GPS base-station close to the operational area with a clear view of the satellites and collecting data for at least two-hours, which includes the timespan of the drone flight itself. The rest of the PPK process is performed in post-mission processing and includes calculating the base-station coordinate and running the differential GPS process. For more details visit Geodetics.com.
RTK is more complex to deploy as corrections from the base-station need to be transmitted via a datalink to the rover during the flight for use in real-time. To make this work, as shown in Figure 1, you need to setup the base-station on a known coordinate, configure a datalink, have a clear line-of-sight to the drone for the operation of the datalink transmitting the differential corrections to the drone, plus have a clear line-of-sight to the satellites. Note that RTK is minimally tolerant to datalink dropouts.
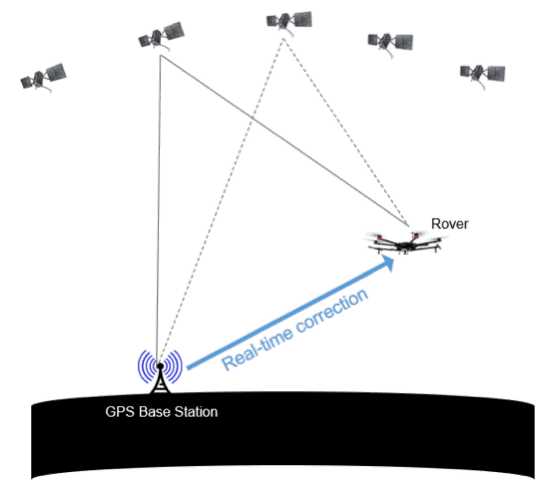
Figure 1: Real-Time-Kinematic (RTK) and Differential GPS Processing
When everything is working well, the accuracy of RTK and PPK will be similar. However, if the rover GPS receiver experiences cycle slips, multi-path or gaps, the PPK solution will be more accurate. With PPK there is the benefit of being able to look at the entirety of the recorded data and run through it forward in time from the beginning to the end of the flight as well as backwards in time from the end of the flight. The ability to perform this forward and backward smoothing of the data is not possible with RTK, which is calculated in real-time.
Considering the added complexity of operating the system with RTK, and the fact that the PPK accuracy is ultimately better than RTK, the question is why bother with RTK at all? There are of course tradeoffs that must be considered. These are summarized in the table below.
Advantages of RTK
- Provides accurate GPS position at real-time
- Better waypoint navigation, required for challenging environments
- Autonomous RTK assisted landing
- No post-processing software package is required for real-time operation
Disadvantages of RTK
- Require to setup on a pre-surveyed base-station with known coordinates
- Requires accurate settings with clear view to the rover/drone at all times
- Requires stable and long-range radio-datalink
- Datalink dropouts and latency
- Limited to the radio range
- GPS outages can impact the system performance
- For GCP-free processing, the drone needs to fly at low speed
- High cost
Advantages of PPK
- Flexibility in using base-stations (you can use even public/avilable reference stations, such as CORS, SoPAC, etc.)
- There is no need for the long-range radio or risk of datalink dropouts
- Provides accurate GPS position for the drone after the flight
- Ability to process in GPS only or GPS/IMU in forward-backward smoothing
- Supports dual-antenna GPS processing
- Support challenging GPS enviroments
- Lower cost
Disadvantages of PPK
- Post-processing software is required
Geodetics Recommendation
- For the survey-grade LiDAR/Camera UAV mapping, PPK can deliver more reliability and longer range from the base station to give users greater flexibility
In many applications in which a real-time high-accuracy solution is required, and post processing is not an option, the use of RTK is preferable. Applications, such as quarry-mapping, mining, accident scene investigation, vehicle automation those found in military/defense can be categorized in this group. Geodetics’ RTK system, the Geo-RR, is ready to use with the entire Geo-MMS family of products.
The main advantage of RTK is that post processing is not necessary to get the GPS/IMU trajectory as this is provided in real-time. However, in Geo-MMS applications, where we will be geo-referencing the LiDAR point cloud in a post mission process anyway, the added PPK processing does not really add much time to the post processing workflow. Thus, we do not lose much by using PPK, but gain the significant advantages offered by PPK.
An additional argument for the use of RTK over PPK is access to PPK processing software. There are many commercial RTK systems available in the market that either have no software for post-processing or the software is expensive to acquire. These software packages become more expensive and complicated when the GPS data integrated with the onboard IMU to provide the 6DOF navigation solution necessary for geo-referencing a LiDAR point cloud. To resolve this problem, Geodetics offers its ‘One Click’ PPK post-processing software for accurate GPS/IMU post-processing.
In conclusion, for Geo-MMS product operations, although RTK is available, Geodetics’ recommends the use of PPK over RTK.
