And How Geodetics Geo-Photomap Photogrammetry Software Supports Image Attitude
One of the main challenges in surveillance or photogrammetry systems mounted to multi-rotary UAV’s is the effect of vibration from wind, turbulence and pitching of the UAV. To address this challenge, many multi-rotor UAV vision systems use a gimbal, which isolates the vision sensors from the drone’s body, thereby nullifying these vibrations. Images captured in this way are typically processed in aerotriangulation or Structure from Motion (Sfm) software to generate a 3D-model. This geometry-free 3D-model can later be geo-referenced using Ground Control Points (GCP). The byproduct of this process is the ‘indirect’ estimation of the position and attitude of images, also called extrinsic or Exterior Orientation Parameter (EOP).
In the ‘direct’ geo-referencing approach utilized in Geodetics’ Geo-Photomap product, the EOP of images are estimated using the onboard GPS/IMU. This approach requires a rigid geometric relationship between the GPS/IMU and the camera, thus, the camera must be attached firmly to the drone body rather than a gimbal. Therefore, the challenge of vibrations, turbulence and pitching must be properly addressed as a gimbal is not used.
We compared image attitude estimated from both the indirect and direct approach. Figure 1 shows the attitude angles estimated for a block with over 1,000 collected images using the two approaches. As can be seen, in both approaches, the yaw (heading) angles are estimated to high accuracy and are very close to each other, as they are both derived from high-accuracy positions of the image centers. However, this is not the case for the tilt angles. In the indirect approach, the roll and pitch angles (tilt) are generally estimated in a range of less than 5°, while using direct estimation, the roll and pitch angles more strongly reflect the attitude of the drone and results in a larger range of tilt and vibrations. So the question is – which tilt attitude is correct?
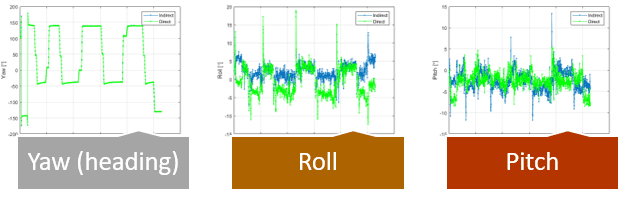
Figure 1: Images Attitude Estimated in Indirect and Direct Approach
We found that with the indirect approach, the majority of existing commercial photogrammetry software packages assume that the images are captured in nadir-look with a small tilt angle, as shown in Figure 2.
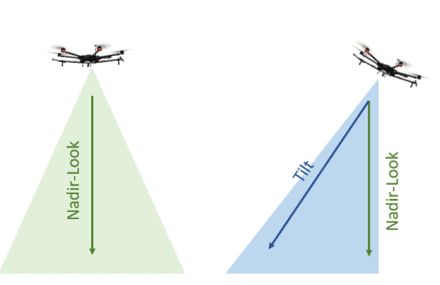
Figure 2: Nadir-Look and Tilt-Look Images
This assumption may not always be valid. This explains why the roll and pitch angles estimated from the indirect approach are coincidentally very close to the threshold of the nadir-look angle, i.e., <5°. On the other hand, with the direct approach, the tilt angle is the actual tilt.
So, the question is – can commercial photogrammetry packages make use the actual attitude generated with the direct approach? The answer depends on the specific software package. Software, such as Agisoft PhotoScan and SkyLine Photomesh support the use of the actual image attitude generated with the direct approach, while in the Pix4D package, this option is not yet available.
