The Impact of Direct Georeferencing on Mobile Mapping
Geodetics’ Geo-MMS product suite has applications in a wide variety of fields, including powerline inspection, Building Information Modeling (BIM) and precision agriculture. This article will provide some clarity to commonly used terminologies and definitions that are frequently used in this field, but might not be fully understood by all interested in these technologies. We fill focus specifically on three related facets of our Geo-MMS products:
- What is mobile mapping?
- What is georeferencing?
- The differences between direct georeferencing and indirect georeferencing.
In essence, mobile mapping is the process of acquiring geospatial data from a mobile platform. For our approach, we are using a LiDAR and/or imaging sensor operating from a UAV, a ground vehicle, a backpack etc. As shown in Figure 1 below, the LiDAR sensor is measuring a slant range and the camera is capturing 2D images. The process of converting the range (1D) and image(2D) into a 3D position is called georeferencing. If the georeferencing process is performed in real-time, we refer to it as direct georeferencing. An indirect georeferencing, the data is recorded and the georeferencing process is performed post-mission. A traditional form of indirect georeferencing is the processing of imagery in aero-triangulation photogrammetry. The processing of geospatial data with direct georeferencing is what has led to the increase in interest and investment in mobile mapping technologies in recent years. The capabilities of direct georeferencing are well recognized in the autonomous driving industry, in which real-time geospatial awareness is the core reasoning for integration of LiDAR and imaging sensors.
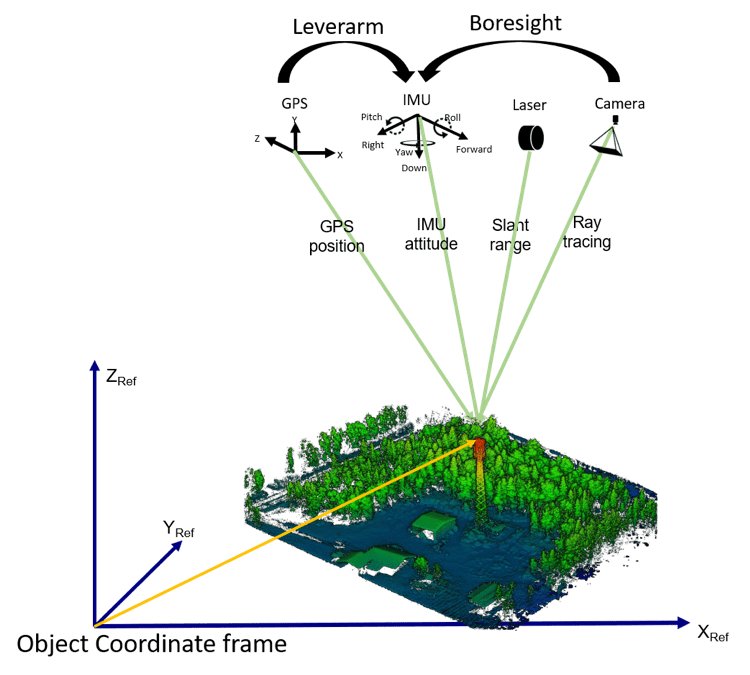
Figure 1: Mobile Mapping Multi-Sensor Integration and Direct georeferencing Geometry
Direct georeferencing technologies such as our Geo-MMS product line are developed and made affordable with the availability of highly accurate and low-cost sensors, including GPS and IMU components. The GPS provides positional information and IMU provides attitude information. Together (referencing the above figure), the GPS/IMU module provides positional and rotational information that translates this information to the vision sensors, allowing for direct georeferencing. However, this translation is only practical for a fixed geometry between all components. For multi-sensor direct georeferencing, a more intricate geometry is required. If you are interested in these details, we encourage you to read the next section. Otherwise, you can trust us and stop here, as we take care of the rest when we ship your unit.
Multi-Sensor Geometry
Figure 2 below depicts the frames involved in our Geo-MMS products. Specifically, we are speaking about five frames:
- Platform frame (considered as reference frame)
- Camera frame
- LiDAR frame
- IMU frame
- Dual-antenna frame
Direct georeferencing is feasible upon correct calibration and alignment of all these frames with respect to each other. This includes calibrating the baseline separation between the two antennas and aligning it with respect to the platform body axes, aligning the IMU-axes to the platform axes (mounting angle), measuring the IMU-to-GPS translation (leverarm), aligning the camera axes to the IMU axes (camera boresight translation/rotation), and aligning the LiDAR axes to the IMU-axes (LiDAR boresight translation/rotation). Simple!
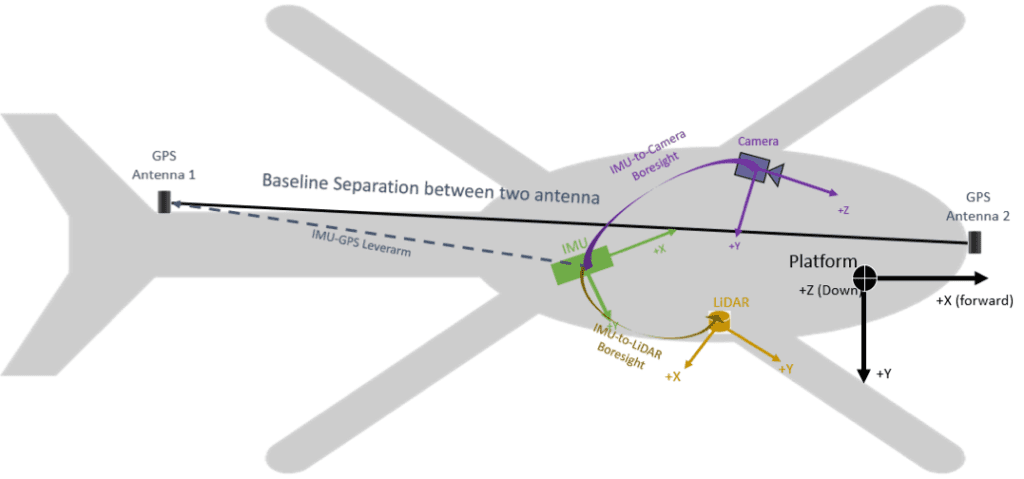
Figure 2: Multi-Sensor Frames Alignments
Summary
For accurate direct georeferencing of LiDAR and camera data, we require highly accurate GPS positioning (RTK or PPK), and highly accurate and precise IMU recordings. With these factors locked down, the immediate challenge is to transfer these measurements to the LiDAR/camera centers. This can be a challenge when dealing with unexpected noise exposure when mounted to a highly vibrational platform (see our previous blog here). The main challenge in security surveillance or photogrammetry systems with a multirotor UAV is unexpected vibrations coming from wind, turbulence and UAV pitches. To this end, many multirotor UAV vision systems are equipped with a gimbal, which isolates the vision sensors from the UAV body, nullifying vibrations and capturing images in a nadir-look direction. The only problem is that this approach is only feasible for indirect georeferencing. Why this mechanism cannot be adopted is the topic for our next blog.
Should you have any questions for our team, please request more information. Already intrigued by the value Geo-MMS products can add to your organization? Request a quote today!
