High Grade IMU for Mobile Mapping Systems
A question that we often get asked from our customers is: “Do I need a Fiber Optic Gyro (FOG) IMU for my Geo-MMS system?” The question can be restated as do we need a higher-grade IMU than MEMS-grade IMU’s for mobile mapping systems such as Geo-MMS? The answer to this question depends on a) desired flight altitude and b) whether or not the system will operate in areas where GNSS reception is difficult.
To correctly geo-reference LiDAR point clouds, high-accuracy attitude (roll, pitch, and yaw – heading) is needed to project a single laser beam from the laser sensor to the earth. The accuracy of this attitude information is a function of the IMU-grade. MEMS-grade IMU’s typically provide the roll and pitch angles at about 0.05° and heading at about 0.25°. Higher grade IMUs, such FOG and Ring-Laser-Gyro (RLG) IMU’s, can improve accuracy to about 0.01°, or 5 times better. However, these sensors are typically heavier, consume more power and require more space — all of which reduce their utility on small UAV’s. Thus, the ideal situation would be to utilize the MEMS device suited to airborne applications on small UAV’s and improve their performance.
One technique to assist MEMS-IMU based systems in estimating a more accurate heading is to utilize a dual-antenna GPS system with antennas mounted at a fixed distance from each other. This technique is called interferometry. The longer the separation between the antennas, the more accurate heading can be estimated. For example, using a 2m separation, heading accuracy can be estimated to better than 0.08° providing a significant improvement over the 0.25° accuracy of the MEMS-IMU alone. With heading improved in this way, the only attitude angles left to improve upon are roll and pitch, which must be accomplished with higher grade IMU’s. Figure 1 (below) shows the correlation between the roll/pitch angular resolution and accuracy required with respect to flight altitude. For example, if the platform flies at 50m, the minimum roll/pitch angular resolution, accuracy, should be in the range of 0.05°. If you fly at a higher altitude, you would need a higher-end IMU, such as a Fiber Optic Gyro or Ring-Laser-Gyro.
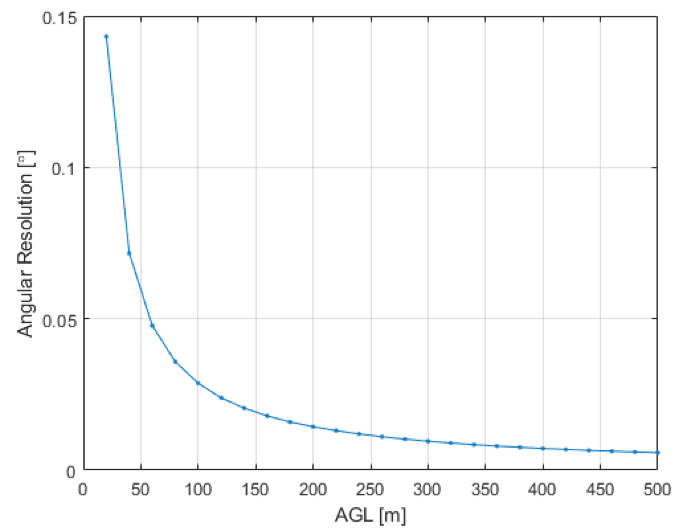
Figure 1: Shows the correlation between the roll/pitch angular resolution and accuracy required with respect to flight altitude. If you fly at a higher altitude, you would need a higher-end IMU, such as a Fiber Optic Gyro or Ring-Laser-Gyro.
The second factor in deciding if a higher-grade IMU is necessary is the operational environment. In addition to attitude, the IMU is also responsible for providing position. However, the inertial position drifts quickly and requires frequent updating with GPS to constrain this drift. If you are operating in a GPS-challenged environment, a higher-grade IMU, which has less position drift rate, may be needed. For comparison purposes, the position from a MEMS-grade IMU can drift up to 10m in one minute, while a Fiber Optic Gyro or Ring-Laser-Gyro will drift less than 2m during the same time (the INS has exponential drift-rate with respect to time). If you are using the system in the air, the chance of losing the GPS signals is rather low as you are well above obstructions. The issue is more pronounced for ground vehicle-based data collection, where the vehicle is dealing with both GPS challenged environments including multi-path or frequent loss of GPS signals and GPS-denied environments (no GPS signals at all). Our customers experience this fact when they operate the system in areas, such in urban environments, close buildings, under trees, etc. If the system is exposed to even more prolonged GPS outages, then even a Fiber Optic Gyro or Ring-Laser-Gyro cannot provide the answer. In this case, the application would require an aiding system. We will address this on our next blog topic. To stay up to date please sign up to receive our monthly newsletter.
