Geo-MMS: From Flight Mission to Drone Flight Planning
Three basic values must be known to correctly plan a data collection mission when using the Geo-MMS family of products:
- Appropriate flight altitude (AGL)
- Appropriate strip separation
- Appropriate flight speed
These values are easy to compute in software, however, we found that most existing commercial drone flight planning software tools are designed for Photogrammetry missions using cameras, and almost none of them were designed for LiDAR missions which require different settings than photogrammetry.
Geodetics recently added a new drone flight planning tool to our software suite to enable our customers to easily calculate these values for LiDAR missions and facilitate flight mission planning for the Geo-MMS products as shown in Figure 1.
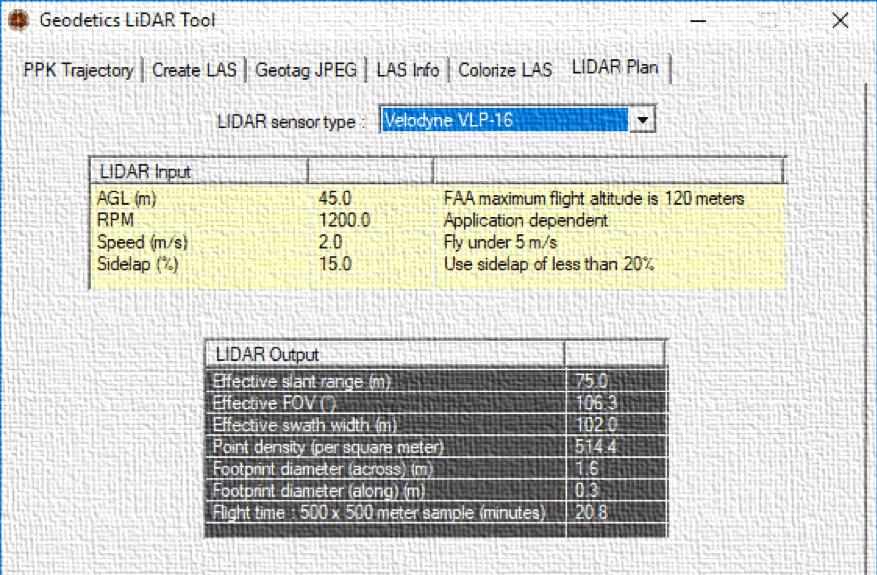
Figure 1: The New Tool of “LiDAR Plan” in the LiDARTool
LiDAR drone flight planning using our new tool begins with the selection of the LiDAR sensor in use. Currently this includes, the Velodyne VLP-32C with 200m nominal range, as well as the Velodyne VLP-16 and HDL-32C with 100m nominal range.
Once the LiDAR is selected, four parameters are input by the user; flight altitude above the ground (AGL), rotation rate of the LiDAR (RPM), flight speed (m/s) and side-lap. An understanding of these parameters is important; thus, they are discussed below.
Flight Altitude
Selecting the appropriate flight altitude requires an understanding of the environment in the area of interest. In many cases, the pilot chooses the flight altitude based on an estimate of the height of features in the area, e.g. trees, buildings, etc., and a sufficient altitude “cushion” is added to avoid the features. If the area is open and high features are not present, the altitude can be selected based on the lower height features of interest. For projects such as road mapping, mining, etc., the lower the altitude flown, the better the results. For these, we recommend keeping the altitude below 30 m. In applications such as topography, the altitude can be relaxed, e.g. 60 m.
Once the flight altitude has been selected for a specific laser scanner, the effective slant range and the laser field of view (FOV) are estimated by the software. The effective swath width represents the separation between the strips. This parameter is estimated as the function of the AGL and the side-lap coverage. For more details about FOV estimation, please check the Appendix.
RPM
The Rotation-per-Minute (RPM) setting of the LiDAR sensor impacts the resolution of the point cloud, which is represented in two forms of the footprint diameter across and along the trajectory path. In general, RPM settings less than 600 are not recommended. For applications, such as forestry, in which we would like to increase the probability of penetrating the tree leaves and get reflections off the tree-trunk or the ground underneath trees, this parameter must be set to its maximum value of 1200.
Flight Speed
Flight speed is another factor in controlling the density and resolution of the point clouds, but this parameter has the greatest impact on flight duration. As an example, the flight time over a block of 500 m x 500 m is also provided. You must consider landing the drone when there are a minimum xx% battery life remain on the drone. For high density and resolution, ideally, the flight speed should be less than 5 m/s.
Once flight mission planning is complete, the information can be loaded into the drone flight planning software. We like UgCS as it provides a one-stop shop for planning and executing the mission. It is relatively inexpensive, fast, extremely capable and reliable. One of the most important features of any mission planning tool is the ability to automatically maintain a given altitude above the ground during flight. This is especially important for LiDAR scanning as the point density, accuracy and coverage rely on being able to follow terrain at a chosen height. Many mission planners do not export the varying waypoint heights from the mission planning software to the autopilot execution software without excessive manual manipulation.
Appendix
In this Appendix, we are clarifying three ranges in our context: nominal range, effective range (or operational range), and slant range. The nominal range of the Velodyne laser scanners are known as 100 m or 200 m. However, it must be noticed that this range is representing the maximum range that can be sensed by these laser scanners when their laser beams hit to high retro-reflective materials, with 100% reflectivity. This range might be interesting for applications such as autonomous driving where the laser scanner must sense any moving targets at the maximum distance for the sake of the sense & avoid, but this is not the range applicable for the mapping projects. Generally, in UAV-based mapping, the laser scanners reflect off materials with reflectively less than 5%. To this end, the effective range of these scanners are usually considered as 75 m and 175 m, respectively. While flying at the effective range altitude, the scanner will end up recording a single profile on the ground. That is because, by flying at this altitude, the laser scanner is operating in zero field-of-view. Any beams beyond this effective range will be recorded as a zero range (you are going to have a GB-Zero LiDAR data). In another word, the effective range of the laser scanner dictates the field of view (FOV) of the laser scanner (not the opposite).
This fact is illustrated in Figure 2, where the effective range of the laser scanner is representing the maximum slant range that can be measured by the laser scanner. For example, if the user set the FOV to 180° (from East to West), they cannot record any range measurements beyond the effective FOV. That is why in our flight mission, the FOV setting is an output value, estimated based on the effective range of the specific laser scanner and the flight altitude.
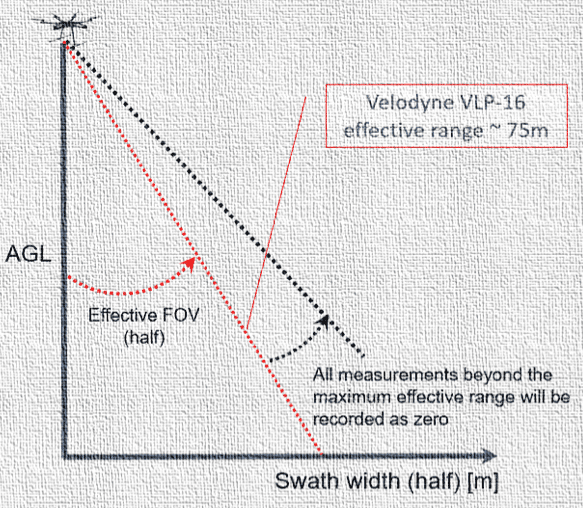
Figure 2: Effective Range and FOV Setting
Learn more about Geodetics Geo-MMS lidar, photogrammetry and point&pixel drone product suite along with their drone flight planning tool by requesting more information!
