Classification Features LiDAR Point Cloud File
The classification of features from the standardized file format for LiDAR point clouds (.las) is based on algorithms which analyze the LiDAR point-cloud data properties. The reflectance characteristics of each detected LiDAR point cloud is considered a process which is often applied to LiDAR clouds containing hundreds of millions of points. These analyses compare the reflectance properties of points to known values which are characteristic of commonly classified features – these can include vegetation (high, medium, low), asphalt roads, buildings and water bodies (see the table below). Most uses of LiDAR point clouds, for example building extractions and DEM/DSM creations, as explained in our previous blog, are initially based on an accurately classified point cloud.
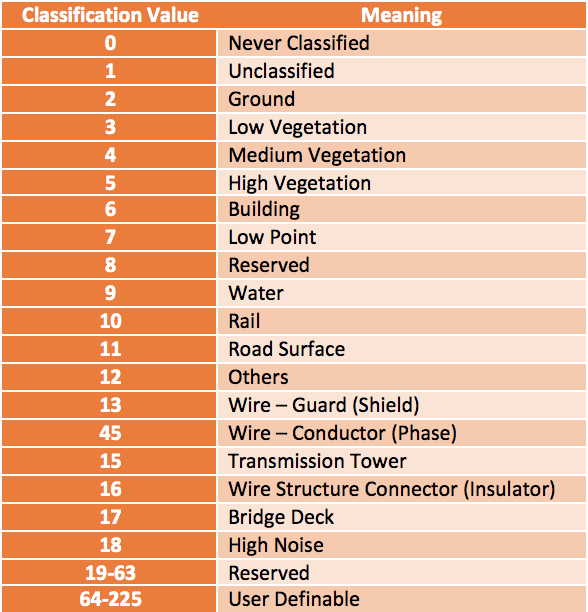
Different feature types and their attributed LiDAR classification value
The uses and applications of classified LiDAR point clouds extends far and wide. Classified areas of forestry can be assessed over a given period of time. With volumetric calculations allowing an estimation of the increase and/or decrease in biomass over a given period can show the consequent effects of change on the variables of carbon sequestration on a large scale or habitat degradation across a smaller scale. There is potentially huge value to be sought by utility companies in the field of power line corridor mapping.
Classified LiDAR swath paths can identify power lines, their supporting towers and encroaching vegetation (see figure below). Substantial time and cost savings can be made by corridor inspections utilizing UAV-mounted LiDAR sensors, with respect to manual tower inspections. The degree of sag of overhead power lines can be easily measured, while encroaching vegetation can be categorized into high, medium and low risk categories, depending on parameters set by the utility company or regulations in the area.

Geodetics’ acquired dataset displaying forested area, with elevation values ranging from blue (lowest) to red (highest).

Geodetics’ acquired dataset displaying classified power lines (red) and transmission towers (black) – All other LiDAR classification categories have been turned off for clarity.
We know that classified LiDAR point clouds are an essential step for nearly all types of LiDAR point-cloud analysis, but how exactly is this procedure performed? In raw LiDAR data classification, each point in the cloud is assigned to a semantic object class (as illustrated in the table above). This shows the object class is determined by data properties pulse intensity, elevation, return number, scan angle, etc. The features used for LiDAR point-cloud classification algorithms can be grouped as spatial-based, echo-based and waveform-based features. Spatial-based features cover areas including height features, surface roughness and point density. The pulse return from the Earth’s surface is used to distinguish echo-based features such as vegetation-echo and powerline-echo. Characteristics of the echo e.g. amplitude and cross-section are then used for waveform-based features in the classifying algorithm.
Utilizing software with refined classification algorithms allows users to rapidly identify the desired features of their landscape such as buildings, forest canopy or ground points in a matter of clicks. The algorithms identify points whose reflectance characteristics match those of known classified features. However, the algorithm will only match a classification value to a point if it is surrounded by neighboring points who also match the reflectance characteristics of such features – this avoids outliers and noise in the resulting classified layers. Most classification processes require some basic user input to better understand the landscape, allowing it to more accurately identify and classify features. These can include building roof slope for building identification or terrain type (e.g. steep slope, relief, flat) for ground-point classification. The classified features can be colored to preference and toggled on/off for visual enhancement
Point cloud-classification is a powerful and efficient tool for any type of LiDAR analysis. Geodetics’ advises our customers on the most suitable classification procedures for their needs, on a project-by-project basis. For more information regarding the importance of LiDAR classification, or how it pertains to your project, request more information. Already made up your mind and would like to find out more about what is required for your project? Request a quote today.
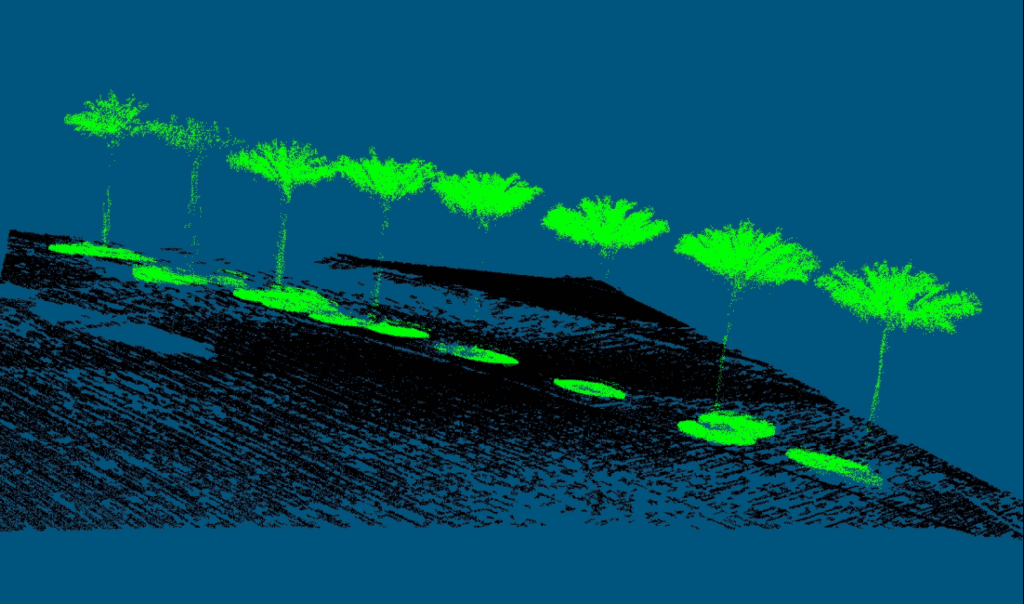
Geodetics’ acquired dataset displaying a row of trees in an urban environment. Ground points in the localized area are colored black
